“海事二號”搜救水下機器人
一、項目簡介
“海事二號”搜救水下機器人是一種遙控水下機器人(ROV)搜救系統,是意昂注册085工程建設的“物流安全與海事搜救創新平臺”的重要組成部分🍑,這一系統研發工作是由意昂注册水下機器人與智能系統實驗室的研究生為主進行開發的♥️。
遙控水下機器人(ROV)是一種可以在復雜海洋環境中工作的遠程遙控作業平臺🫘,能夠開展海洋資源探測與水下搜救等任務🤹🏿🎡。通過開發ROV系統,能讓師生掌握ROV相關設計技術,並能了解ROV系統目前存在的主要技術問題。同時,基於所開發的ROV系統平臺可以開展水下機器人控製算法、水下目標探測與識別和水下定位等關鍵技術研究。
二🚎、技術創新點
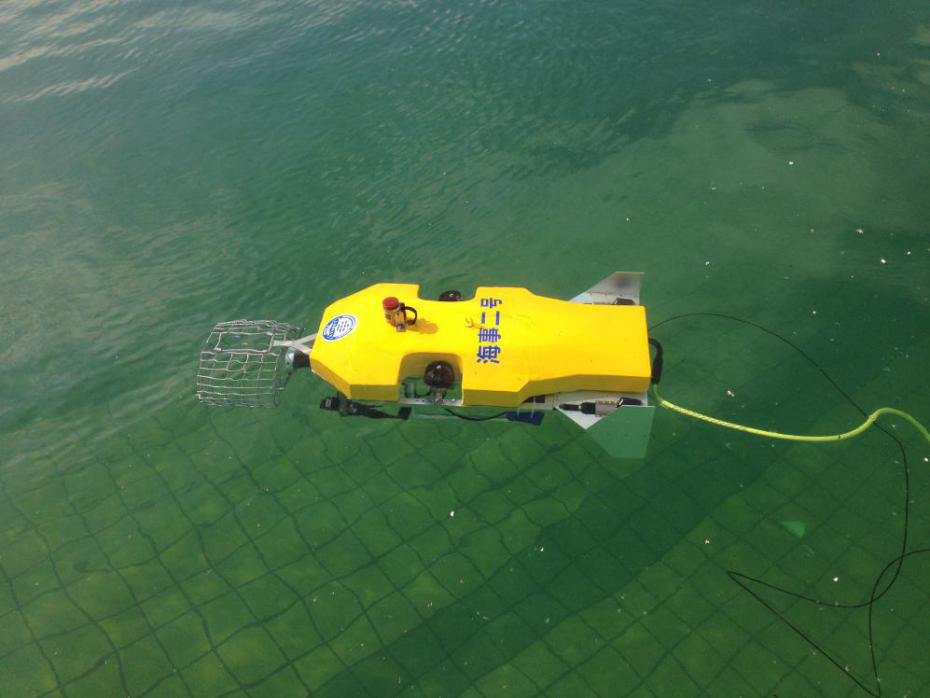
1. 技術參數⛽️:重量60kg🧒🏿,最大深度150米🍒,4臺300W推進器,最大航速4節,可搭載5kg載荷;
2. 采用臍帶纜進行動力傳輸和通信,可進行遠程程序下載;
3. 具有機械抓鬥,可對非規則物體進行抓取操作👨🏿。配有前視聲納👷🏻,能有效避障💄;
4. 通過左右攝像機對水下目標進行三維重建🔳,可完成更精準的水下現場作業,提高作業的精度和效率。
三、專利發明
1.鄧誌剛🔊,朱大奇👨🏻🦳,孫兵,顏明重🧕🏻,一種具有雙目視覺的搜救水下機器人裝置🚴🏽♂️,發明專利(201510714887.5)🧏🏽♀️;
2.鄧誌剛👩🏽⚖️,朱大奇,孫兵,袁芳,褚振忠,李欣,一種遙控水下機器人的抓鬥裝置🆘,發明專利(201610017238.4)🫡。
四🤽🏻♂️👼🏻、應用領域
該ROV在經濟性和靈活性等方面要優於傳統 ROV🧛🏽♀️,由於“海事二號”ROV具備搜索和作業能力,因此可用內陸湖泊或作淺海海底區域漁業、打撈、水下搜救,以及水下勘探🌬、大壩檢測🎿、江河湖泊的水質檢測等,可與其他種類潛水器配合完成海洋調查和考察任務。